APPLICATION
Introduction : Adieu Métal, Bonjour Souplesse
Depuis des décennies, l’imaginaire collectif assimile la robotique à des créatures de métal, aux mouvements saccadés et au fonctionnement rigide. Cette ère touche à sa fin. Une révolution silencieuse, puisant son inspiration au cœur du monde vivant, est en marche : la robotique molle (soft robotics). En s’affranchissant des armures d’acier pour embrasser la souplesse des polymères, cette discipline ne cherche plus à dominer la nature mais à l’imiter. Elle promet des machines capables de se faufiler dans les recoins les plus infimes, de saisir un œuf avec délicatesse ou de naviguer dans le corps humain sans l’abîmer. Bienvenue dans l’ère du robot doux, adaptable et résilient.
La robotique molle est une discipline innovante qui s’inspire directement de la nature pour concevoir des machines capables de se déformer, s’adapter et interagir de manière plus sûre et efficace avec leur environnement. Contrairement aux robots traditionnels rigides, ces dispositifs sont fabriqués à partir de matériaux souples comme le silicone, les polymères ou les hydrogels, permettant des mouvements plus fluides et naturels. Cette approche, connue sous le nom de biomimétisme, imite des organismes vivants tels que les vers de terre, les poulpes, les étoiles de mer ou les raies manta pour développer des solutions technologiques.
Imaginez un robot. Vous voyez très certainement un être rigide, anguleux, fait de métal et de câbles, s’articulant avec une précision saccadée. Et si cette image était déjà obsolète ? Une révolution silencieuse est en marche dans les laboratoires du monde entier : la robotique molle (soft robotics). Inspirée par la nature la pieuvre, le ver de terre, la méduse, cette discipline cherche non pas à dompter la nature avec de l’acier, mais à l’imiter avec des matériaux souples, flexibles et adaptatifs. Bienvenue dans l’ère du robot doux.
Aux Origines : Le Biomimétisme comme Fondement
La robotique molle ne s’est pas développée par hasard. Elle est l’aboutissement d’une prise de conscience fondamentale : pour créer des machines capables d’évoluer dans notre monde complexe et imprévisible, le meilleur modèle se trouve dans la nature elle-même, après 3.8 milliards d’années de R&D. Le biomimétisme n’est pas qu’une source d’inspiration ; c’est le fondement philosophique et technique de toute la discipline.
- La Pieuvre : Le “Saint Graal” de la Robotique Molle :
La pieuvre est, sans conteste, l’archétype le plus étudié et le plus influent. Chacune de ses caractéristiques représente une leçon d’ingénierie :
-
La Hyper-Redondance Kinématique : Un bras de pieuvre est composé d’un nombre presque infini de degrés de liberté (en raison de l’absence de squelette). Cela lui confère une dextérité inégalée. Pour la robotique, cela signifie qu’il faut abandonner le contrôle précis de chaque articulation pour adopter un contrôle global de la déformation, souvent via la pression de l’air dans des cavités spécifiques. Les travaux pionniers de l’Institut Italien de Technologie (IIT) ont consisté à reproduire la structure musculaire du bras de pieuvre (le muscle longitudinal, transversal et oblique) avec des actionneurs pneumatiques en silicone, créant des mouvements d’extension, de flexion et de torsion d’une fluidité remarquable.
-
L’Embodiment et l’Intelligence Distribuée : Près des deux tiers des neurones de la pieuvre sont situés dans ses bras. Cela signifie que ceux-ci peuvent traiter l’information sensorielle et prendre des décisions motrices de base localement, sans remonter au cerveau central. Ce concept d'”intelligence incarnée” (embodied intelligence) est crucial en robotique molle. Au lieu de dépendre d’un unique processeur central et de calculs lourds, l’intelligence est “matérielle” : la structure physique du robot et la disposition de ses actionneurs lui permettent de réagir de manière adaptative à son environnement de façon quasi réflexe. Un robot-pince molle, par sa conception, s’enroulera naturellement autour d’un objet sans qu’un algorithme complexe n’ait à calculer la forme de cet objet.
-
2. Au-Delà de la Pieuvre : Une Faune d’Inspirations:
Le vivant offre une infinité de modèles résolvant des problèmes spécifiques :
Le Ver de Terre et le Péristaltisme : Son corps est un “hydrostat musculaire” un sac de fluide autour duquel des muscles se contractent. La séquence de contraction/relâchement des muscles circulaires et longitudinaux crée des ondes qui le propulsent vers l’avant. Ce principe est reproduit avec des actionneurs pneumatiques annulaires pour créer des robots fouisseurs (pour l’exploration géologique ou archéologique) ou des robots de progression dans des conduits (inspection de pipelines).
- La Méduse et l’Efficacité Energétique : Son mode de propulsion par pulsation (recule de jet) est extrêmement efficient. En créant des robots méduses à base d’élastomères diélectriques (DEA) qui se contractent sous tension électrique, les chercheurs du California Institute of Technology (Caltech) et de l’Université de Virginie ont développé des nageurs sous-marins autonomes, silencieux et à très faible consommation énergétique, idéaux pour une exploration océanique à long terme sans perturber la faune.

3. La Philosophie Sous-Jacente : Lâcher le Contrôle pour Mieux Maîtriser:
Le biomimétisme en robotique molle implique un changement de mentalité profond pour les ingénieurs. Il s’agit de lâcher prise sur le contrôle micrométrique et déterministe qui prévaut en robotique rigide. Au lieu de lutter contre l’environnement pour imposer une trajectoire parfaite, le robot mou l’utilise à son avantage. Sa déformation est sa fonction. Cette approche, plus humble et plus robuste, pourrait bien être la clé pour créer des robots qui ne sont plus confinés aux usines mais qui peuvent enfin évoluer dans le monde désordonné des humains.
La Rupture Technologique : Le Cœur Matériel de la Révolution Molle
La véritable rupture de la robotique molle ne réside pas seulement dans sa forme mais dans sa substance même, car abandonner le métal et les moteurs a nécessité une réinvention complète de la chair et des muscles des robots, ce qui a donné naissance à une ingénierie des matériaux intelligents et à des modes d’actionnement radicalement nouveaux qui transforment notre approche de la conception robotique.
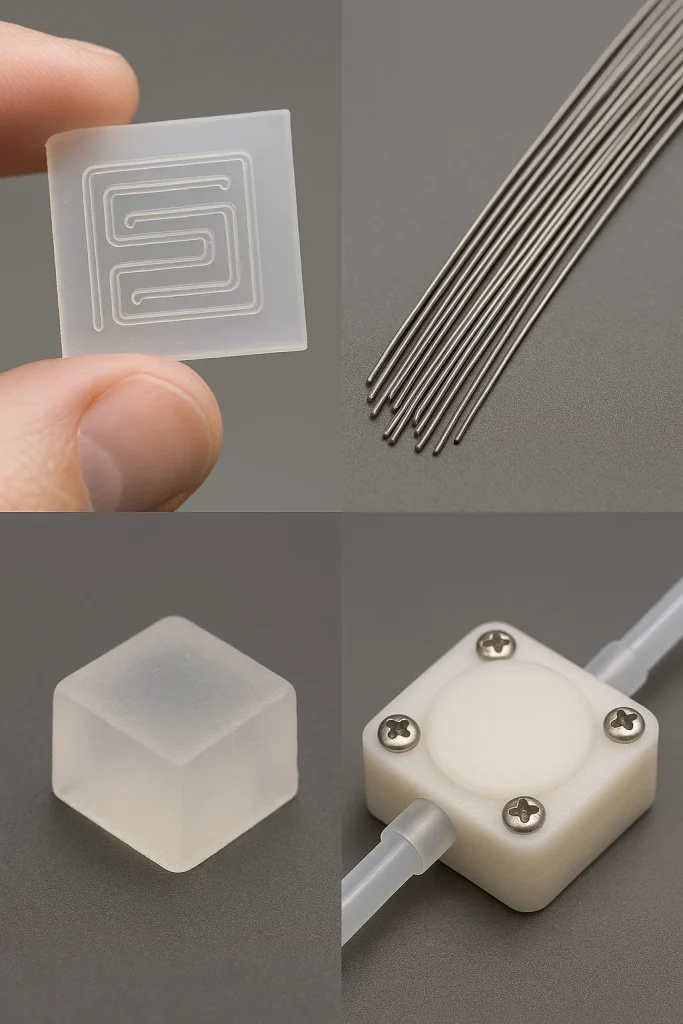
Au cœur de cette révolution se trouvent les matériaux intelligents qui servent de chair aux robots, des substances dotées de propriétés actives leur permettant de sentir, de réagir et même de se soigner seuls, comme les élastomères diélectriques qui fonctionnent comme des muscles artificiels ultimes en utilisant un sandwich de silicone souple entre deux électrodes souples qui, lorsqu’une haute tension est appliquée, voient les électrodes s’attirer, comprimant le silicone et l’étendant dans le plan exactement comme un muscle qui se contracte, offrant des mouvements silencieux et rapides avec une grande densité de force, ce qui les rend idéaux pour des mouvements fins et précis tels que les battements d’une nageoire de robot-méduse, bien qu’ils présentent le défi de nécessiter des tensions électriques très élevées qui posent des problèmes de sécurité et d’intégration électronique.
Les alliages à mémoire de forme représentent une autre avancée majeure avec leur capacité à se contracter par la chaleur, utilisant des fils métalliques en nickel-titane qui mémorisent deux formes et qui, lorsqu’on les chauffe généralement par effet Joule en faisant passer un courant électrique, se contractent violemment pour retrouver leur forme mémoire avant de se détendre en refroidissant, offrant ainsi une force de contraction extrêmement élevée dans un format compact et léger parfait pour les applications où l’espace est limité, même si leur efficacité énergétique reste faible avec beaucoup d’énergie dissipée en chaleur et une cinétique limitée par le temps de refroidissement.
Les hydrogels stimuli-responsifs poussent l’innovation encore plus loin en ouvrant la frontière du bio-hybride, ces polymères gorgés d’eau pouvant changer de volume ou de forme de manière réversible en réponse à un stimulus spécifique comme un changement de pH, de température, de lumière ou la présence d’un champ magnétique, offrant une biocompatibilité parfaide qui ouvre la voie à des robots pouvant opérer dans le corps humain et être contrôlés par des signaux biologiques, bien qu’ils génèrent encore une force faible et présentent des temps de réponse parfois lents.
Faire fonctionner ces muscles innovants requiert des systèmes d’actionnement et d’alimentation tout aussi révolutionnaires qui agissent comme le système nerveux et sanguin des robots mous, l’actionnement pneumatique et hydraulique demeurant la méthode la plus répandue en utilisant de l’air comprimé ou des liquides pour gonfler et dégonfler des cavités intégrées dans le robot, une approche simple et puissante popularisée par des pionniers comme le Harvard’s George M. Whitesides Research Group, mais qui évolue désormais vers des systèmes sophistiqués incorporant des vannes microfluidiques complexes intégrées directement dans le corps du robot pour contrôler indépendamment différents segments, imitant ainsi le système nerveux périphérique avec une précision toujours plus grande.
L’enjeu ultime de l’autonomie constitue le Saint Graal de cette discipline, car les pompes à air et les batteries traditionnelles restent lourdes, encombrantes et bruyantes, limitant considérablement la mobilité et l’indépendance des robots mous, ce qui pousse les chercheurs à explorer des solutions émergentes comme l’utilisation de réactions chimiques catalytiques pour générer du gaz et gonfler les actionneurs, une technique employée avec succès par le Octobot de Harvard pour créer le premier robot entièrement souple sans aucune pièce rigide, tandis que d’autres avenues prometteuses incluent l’alimentation sans fil par induction pour actionner de petits actionneurs comme les DEA et l’energy harvesting pour récolter l’énergie directement depuis l’environnement grâce aux vibrations, à la lumière ou aux gradients de température, autant de pistes qui pourraient libérer les robots mous de leurs entraves énergétiques et leur offrir une véritable autonomie opérationnelle.
Le Champ des Possibles : Applications Présentes et Futures
La médecine constitue le domaine d’application le plus prometteur. La biocompatibilité et la sécurité intrinsèque des robots mous en font des candidats idéaux pour interagir avec le corps humain. Des cathéters intelligents pourraient naviguer de manière autonome dans le système vasculaire cérébral pour traiter des AVC avec un risque minimal. Des robots endoscopiques mous progressant seuls dans le système digestif permettraient des biopsies sans douleur. Déjà, des exosquelettes souples et textiles, légers et discrets, sont développés pour la rééducation de patients, comme ceux conçus par le Harvard Biodesign Lab.
Dans le domaine des secours et de l’exploration, la robotique molle brille là où la rigidité est un handicap. Un robot mou peut se comprimer, ramper et se faufiler dans des décombres après un séisme pour localiser des survivants, là où un robot traditionnel resterait coincé. Le projet “Octobot” de l’Université d’Harvard, premier robot entièrement souple et autonome, incarne cette vision. Sous l’eau, des robots inspirés de la méduse ou du poisson, à la nage silencieuse et efficiente, pourraient révolutionner l’exploration océanique sans perturber les écosystèmes.
Enfin, dans le secteur industriel et logistique, la robotique molle introduit une nouvelle forme de collaboration homme-machine. Des pinces souples, comme celles commercialisées par la société Soft Robotics Inc., peuvent saisir et manipuler des objets fragiles et de formes variables – des fruits aux pièces délicates – sans programmation complexe et sans risque de les écraser. Cette capacité permet une automation dans des environnements non structurés qui était jusqu’alors impossible, promettant de transformer des secteurs comme l’agroalimentaire ou la logistique
Les Défis de la Souplesse : La Complexité Cachée
Malgré son potentiel immense, la robotique molle se heurte à des défis techniques de taille qui freinent encore sa commercialisation à grande échelle. L’alimentation énergétique est un premier obstacle : les compresseurs d’air et les batteries nécessaires sont souvent encore encombrants et limitent l’autonomie des robots, les reliant fréquemment à une source externe.
Le contrôle et la précision représentent un défi intellectuel majeur. Modéliser et commander avec exactitude un corps déformable est un problème mathématique bien plus complexe que pour un bras articulé rigide. Cela nécessite le développement de nouveaux algorithmes, souvent basés sur l’intelligence artificielle, pour apprendre à maîtriser cette souplesse.
Enfin, des questions de durabilité se posent. Les polymères souples sont susceptibles de se percer, de se déchirer ou de se dégrader avec le temps et l’usage. La recherche actuelle se concentre donc sur des matériaux auto-cicatrisants et sur l’intégration robuste de l’électronique et des capteurs dans ces structures malléables sans en compromettre la flexibilité.

L'Impact Environnemental : L'Angle Mort de la Révolution Molle
Derrière l’enthousiasme pour les robots bio-inspirés se cache une réalité moins glamour : leur dépendance aux silicones et polymères issus de la pétrochimie. Ces matériaux, bien que permettant une souplesse révolutionnaire, posent un sérieux problème de fin de vie. Incinération ? Enfoussisement ? Le risque est de voir émerger une nouvelle génération de déchets électroniques non-recyclables, mous et complexes à traiter.
Mais la recherche esquisse des solutions radicales. La piste la plus prometteuse vise à créer des robots biodégradables, conçus pour une mission unique avant de disparaître sans trace. Des laboratoires développent ainsi des hydrogels à base de cellulose ou de chitine (issue des carapaces de crustacés), et travaillent sur l’auto-cicatrisation des matériaux pour prolonger leur durée de vie.
L’enjeu énergétique est tout aussi crucial. L’actionnement pneumatique, très gourmand, ou les hautes tensions requises par les actionneurs diélectriques, questionnent l’efficacité réelle de ces systèmes. Le défi est de taille : créer une technologie à la fois douce avec ses utilisateurs et avec la planète. La durabilité n’est plus une option, mais le prochain frontier à conquérir pour la robotique molle.

La Cybersécurité des "Chairbots" : La Nouvelle Frontière Vulnérable
Alors que la robotique molle révolutionne la médecine avec des implants capables de se déformer dans le corps humain, une question cruciale émerge : comment sécuriser des machines dont la “chair” même peut être piratée ? La cybersécurité des robots mous ou “chairbots” représente un défi sans précédent, où la menace numérique rencontre la vulnérabilité physique de manière intimate et potentiellement mortelle.
Pirater un Cœur Artificiel Mou : Le Scénario Cauchemar
Imaginez un pacemaker nouvelle génération, utilisant des actionneurs mous pour mimiquer plus naturellement les contractions cardiaques. Maintenant, imaginez qu’un attaquant prenne le contrôle à distance de son système de calibration. En sur-sollicitant les actionneurs, il pourrait provoquer une défaillance catastrophique non pas en “crashent” le logiciel, mais en forçant physiquement le matériel à se déchirer ou à dysfonctionner. Cette vulnérabilité est unique : le piratage ne corrompt plus des données, mais détruit littéralement la machine de l’intérieur, avec des conséquences directes sur le patient.
La Vulnérabilité Physique des Actionneurs : Le Retour à l’Âge Analogique
La sécurité des robots mous ne se joue pas seulement dans le code. Leurs actionneurs pneumatiques et hydrauliques présentent une faille physique ingénieuse à exploiter :
-
Sabotage par obstruction : Introduire microparticules ou gels dans les conduits d’air/liquide pour bloquer les mouvements ou endommager irrémédiablement les systèmes de valves.
-
Attaque par surpression : En prenant le contrôle d’une pompe externe connectée, un attaquant pourrait envoyer une surpression délibérée faisant éclater les actionneurs internes comme un ballon trop gonflé.
-
Capteurs trompés : La majorité des robots mous s’appuient sur des capteurs de pression intégrés pour contrôler leur mouvement. Leurrer ces capteurs par des signaux bruités ou brouillés revient à rendre le robot “aveugle” à sa propre position, pouvant le faire se tordre ou se comprimer jusqu’à l’autodestruction.
Des Protocules de Sécurité à Réinventer
Sécuriser ces systèmes requiert une approche radicalement nouvelle :
-
Séparation stricte des couches : Isoler physiquement les systèmes critiques (ex: actionneurs cardiaques) de toute connectivité sans fil. Seul un accès physique direct devrait permettre leur recalibration.
-
Capteurs de “santé” matérielle : Intégrer des jaugeurs d’élasticité ou des senseurs de micro-déchirure capables de détecter une sollicitation anormale et de déclencher un arrêt d’urgence avant la défaillance.
-
Chiffrement des signaux physiques : Sur les systèmes connectés, le signal de contrôle de la pression pneumatique ou de tension des DEA doit être chiffré pour éviter toute interception ou modification malveillante.
Un Dilemme Éthique Inédit
Faut-il privilégier la sophistication des fonctionnalités au détriment de la sécurité ? Rendre un robot mou totalement “cyber-proof” pourrait significativement limiter ses capacités d’adaptation et de contrôle en temps réel. La course à l’innovation dans le domaine médical ne doit pas reproduire les erreurs de l’IoT, où la sécurité a trop souvent été une réflexion tardive.
La robotique molle nous confronte ainsi à un futur où la cybersécurité ne se mesure plus en gigaoctets volés, mais en vies mises en danger par la manipulation de chair artificielle. Sécuriser le code ne suffira plus ; il faudra apprendre à sécuriser la matière elle-même.
Le Défi de la Communication et de la Localisation : Naviguer en Aveugle dans un Monde Mou
Si la robotique molle repousse les limites de l’interaction physique, elle ouvre dans le même temps un problème fondamental : comment localiser et communiquer avec une machine dont la forme et la position sont constamment changeantes, et qui évolue bien souvent dans des environnements opaques et difficilement accessibles ? Ce défi, souvent occulté par l’éclat des innovations matérielles, est pourtant la clé qui permettra à ces robots de passer du stade de prototype de laboratoire à celui d’outil opérationnel.
La Traque du Fantôme : Localiser l’Insaisissable
Les solutions de localisation traditionnelles – GPS, caméras, lidars – sont inopérantes pour un robot qui se déforme à l’intérieur du corps humain, sous des décombres ou au fond des océans. Leurs principaux obstacles sont :
L’Opacité des Milieux : Les ondes radio sont fortement atténuées par l’eau ou les tissus biologiques.
L’Absence de Référence : Un robot sans squelette rigide n’a pas de “points” fixes à suivre.
Les Déformations Constantess : Sa forme changeante rend difficile l’identification et le suivi dans le temps.
L’Éventail des Solutions Explorées : De l’IRM au Magnétisme
Face à ce défi, les chercheurs innovent avec des méthodes souvent détournées de leur usage initial :
Le Guidage par IRM : Utiliser un scanner à Imagerie par Résonance Magnétique comme système de localisation et de contrôle ultrap précis. Le champ magnétique de l’IRM permet de visualiser le robot et peut même, pour certains modèles magnétiques, être utilisé pour le tirer et le guider avec une extrême finesse à travers les vaisseaux sanguins. C’est une solution très précise mais extrêmement coûteuse et immobilisante.
L’Écholocalisation Ultrasonore : Intégrer de minuscules émetteurs-récepteurs à ultrasons dans le corps du robot. En analysant l’écho des ultrasons renvoyés par les tissus ou les parois qui l’entourent, le robot peut, à la manière d’une chauve-souris, se construire une carte de son environnement immédiat et s’y localiser. C’est la méthode privilégiée pour les applications intracorporelles.
Le Marquage Magnétique : La piste peut-être la plus prometteuse. Elle consiste à imprégner le matériau du robot de nanoparticules magnétiques ou à y fixer de minuscules aimants permanents. Un système de bobines magnétiques externes peut alors générer des champs qui permettent à la fois de localiser le robot avec une grande précision (en traquant la source du champ magnétique) et de le guider en le “tirant” littéralement à travers les tissus. Cette méthode est puissante, peu encombrante et évite les radiations.
Communiquer à Travers la Chair : La Transmission des Données
Une fois localisé, reste à recevoir ses données (images de l’endoscope, mesures de capteurs) et à lui envoyer des commandes. Là encore, la radiofréquence standard est inefficace.
Les Ultrasons comme Modem : Les mêmes ondes utilisées pour la localisation peuvent servir de support de communication, en modulant le signal pour y encoder des données. Le débit est faible, mais suffisant pour des commandes simples ou des images compressées.
La Communication par Conductivité : Pour les robots in vivo, une pesse audacieuse explore l’utilisation des propriétés conductrices des tissus biologiques eux-mêmes comme milieu de transmission pour de faibles signaux électriques.
Un Défi qui Façonne la Conception
Ce défi n’est pas secondaire ; il remodelle la conception même des robots. Les chercheurs doivent désormais penser la localisation et la communication comme une fonction matérielle intrinsèque, et non comme une couche ajoutée a posteriori. L’ère du robot mou “muet” et “aveugle” est révolue. La prochaine génération devra naître avec ses sens et sa voix déjà intégrés à sa chair synthétique, lui permettant de nous raconter ce qu’il touche et de nous guider vers où il va, même au plus profond de l’inconnu.

Conclusion
La robotique molle ne se résume pas à une simple évolution technologique ; elle incarne un changement de paradigme profond dans notre rapport à la machine. En cessant de lutter contre les lois de la nature pour leur imposer la rigidité du métal et la précision brutale de l’engrenage, nous avons choisi de les épouser. Cette discipline nous enseigne que la véritable sophistication ne réside pas dans la complexité algorithmique pure, mais dans l’intelligence de la conception matérielle une intelligence souvent empruntée au vivant après des milliards d’années d’évolution.
Des tentacules de pieuvre aux vers de terre, le biomimétisme a offert un fondement non seulement technique, mais philosophique : la déformation comme fonction, l’adaptation comme principe. Cette inspiration a permis la rupture technologique des matériaux intelligents et des actionneurs révolutionnaires, ouvrant un champ des possibles immenses, de la médecine régénérative aux secours inédits.
Cependant, cette révolution douce se heurte à des défis à sa mesure : la complexité du contrôle, l’angle mort environnemental de ses matériaux, les vulnérabilités cybersécurité inédites des « chairbots » et le défi crucial de la localisation dans des environnements opaques. Ces obstacles nous rappellent que imiter la nature est une entreprise d’une immense humilité, qui demande de renoncer au contrôle absolu pour accepter une certaine part d’incertitude et d’émergence.
À l’heure des choix, la robotique molle se trouve à un carrefour. Saura t’elle devenir véritablement durable, en développant des matériaux biodégradables et des énergies autonomes ? Parviendra t’on à sécuriser cette chair artificielle sans en étouffer le potentiel ? Pourra t’elle quitter les laboratoires pour affronter le monde réel ?
Une chose est certaine : elle a déjà changé notre imaginaire. La machine de demain ne sera plus nécessairement un être de métal froid et luisant, mais pourra être un partenaire souple, adaptable et résilient. Elle ne nous remplacera peut-être pas, mais elle nous apprendra sans doute à mieux comprendre les mécanismes du vivant, et à trouver, enfin, une forme de symbiose entre la technologie et la nature. La révolution molle est donc bien plus qu’une discipline d’ingénierie : elle est une invitation à penser autrement.
Et vous, seriez-vous prêt à vous faire implanter un dispositif médical capable de se déformer dans votre corps, si cela devait vous sauver la vie ?
La question n’est plus tout à fait de la science-fiction.
Références et Lecture complémentaires
NASA Glenn Research Center. (2020). Shape Memory Alloy Actuators for Space Applications. https://www.nasa.gov/sites/default/files/atoms/files/2016_nia_sma_workshop_10_holt.pdf
Wehner, M., et al. (2016). An Integrated Design and Fabrication Strategy for Entirely Soft, Autonomous Robots. Nature, 536(7617), 451-455. https://doi.org/10.1038/nature19100
Soft Robotics Toolkit : Une plateforme en open-source de l’Université d’Harvard regroupant ressources, tutoriels et designs. [Site : softroboticstoolkit.com]
IEEE Spectrum – Robotics Section : Suivez le tag “Soft Robotics” pour les dernières avancées. [Site : spectrum.ieee.org/topic/robotics/soft-robotics/]
Festò – Octopus-inspired soft robot : [Video : youtube.com/watch?v=ouspMRnIobo]
Soft Robotics Inc. (2023). mGrip™ Technology: Adaptive Robotic Gripping. https://www.softroboticsinc.com/technology
L’Expertise derrière l’Article
Djelika Bocar Cisse, Stagiaire chez Mali Développeur SARL, j’allie expertise technique et vision stratégique pour décrypter les tendances émergentes.
Pour plus d’informations voici mon LinkedIn